比年来,无东谈主驾驶遨游器(UAV)发展飞快,应用鸿沟平淡。高空任务对东谈主类工东谈主具有挑战性,且需要与环境进行主动交互【ADVR-480】発情マゾ愛奴,扩大了无东谈主机操作的需求。空中交互或空中摆布也因此而受到原谅,尤其在实验构兵弱势检查、清洁或休养等任务时。
在空中操控任务(UAMs)中,无东谈主机需在与外部物体构兵时准确追踪参考构兵力或畅通轨迹。然则,现存责任东要聚焦于畅通联想,频频将无东谈主机与环境间的交互力视为干涉身分。这一鸿沟的中枢挑战在于支吾非线性飞舞扰动。然则,先前的商榷主要聚积于保捏静态构兵点或力,衰退一种通用的措置决策来灵验追踪贯穿、时变的畅通和力轨迹。
▍提倡新计谋,达成贯穿时变构兵力与畅通轨迹同期追踪
为达成无东谈主机(UAV)在实验空中交互任务时对贯穿时变构兵力和畅通轨迹的同期追踪,卡内基梅隆大学和宾夕法尼亚州立大学的商榷东谈主员对此进行了深切商榷。
前不久,商榷团队提倡了一种改进的构兵感知轨迹设估量打算法。该算法约略在构兵平面内生成动态且可行的构兵力和畅通轨迹。同期,他们还开垦了一种先进的构兵感知夹杂畅通-力物化算法,使无东谈主机(UAM)约略同期追踪贯穿时变的构兵力和畅通轨迹,并灵验赔偿摩擦力等干涉身分。此外,商榷团队应用全运转六旋翼空中机械手,联想了一套完整的系统和过程,包括用户输入界面、轨迹联想器、物化器和结尾实验器,告捷达成了空中书道任务的精确乎验。
空中书道任务不仅条目UAV具备高精度的畅通物化智力,还需要把柄线条粗细动态调整构兵力,因此成为考证本商榷措施灵验性的理念念平台。为了考证该措施,商榷团队开垦了一个无邪的触摸屏界面,用于用户输入,并接受了一种新颖的海绵笔联想算作结尾实验器,在空中书道任务上进行了演示。通过空中书道任务这一代表性应用,充分展示了该措施在精确物化线条宽度和容颜方面的优胜性。
▍聚焦空中书道,联想系统化措置决策
实验空中交互任务时,如何同期且准确地物化无东谈主机结尾实验器的畅通轨迹和构兵力是一个中枢挑战。这种智力关于好多高难度的空中功课至关进军,尤其是在需要细巧操作和环境交互的场景中,如空中书道任务。
具体到空中书道,商榷团队提倡了一个高度精确的需求:无东谈主机不仅需要沿着预界说的旅途转移,还要把柄每个点的线宽条目动态调整其结尾实验器施加的构兵力。这不仅试验了无东谈主机的畅通物化智力,还对其感知和反应环境变化的智力提倡了极高条目。
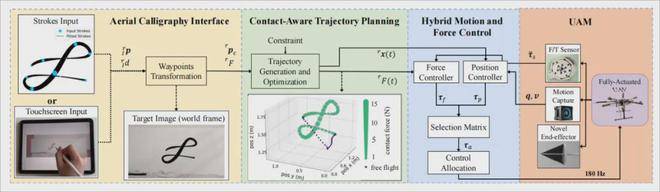
为达成无东谈主机在空中交互任务中的高精度畅通与力物化,商榷团队联想了一套系统化的措置决策。该系统涵盖了从用户输入到任务实验的全过程,具体包括以下几个方面:
领先,用户通过空中书道界面输入标的笔画或字母,这些输入不错是手动界说的旅途点,也不错通过触摸屏界面平直画图。界面随后将这些输入窜改为任务空间中的稀少旅途点,这些旅途点包含了实验空中书道任务所需的要害信息,如位置和预期的线宽。
接下来,商榷应用构兵感知轨迹联想器来处理这些旅途点。联想器的中枢任务是生成一条动态可行的畅通-力轨迹,这条轨迹不仅需要确保无东谈主机约略平滑地转移,还需要在不同点施加正确的构兵力,以得志画图线条粗细的条目。这一过程触及复杂的优化算法,需要笼统接头无东谈主机的能源学特点、环境不休以及任务需求。
在生成了参考轨迹之后,商榷联想了夹杂畅通-力物化器来确保无东谈主机约略紧密奴隶这条轨迹。物化器连合了畅通物化和力物化的上风,约略在无东谈主机与环境交互时快速反应各类扰动,如摩擦力等。这种夹杂物化花样使得无东谈主机在复杂的空中功课环境中推崇出更高的鲁棒性和精确性。
为了达成细巧的线条画图效果,商榷还特别联想了一种新式的海绵笔结尾实验器。这种结尾实验器约略把柄无东谈主机施加的构兵力动态调整线条的宽度,从而精确地再现用户输入的笔画或字母。此外,为了确保用户输入的绵薄性和直不雅性,商榷还开垦了一种触摸屏界面,允许用户通过马虎的触摸操作来界说和修改标的轨迹。
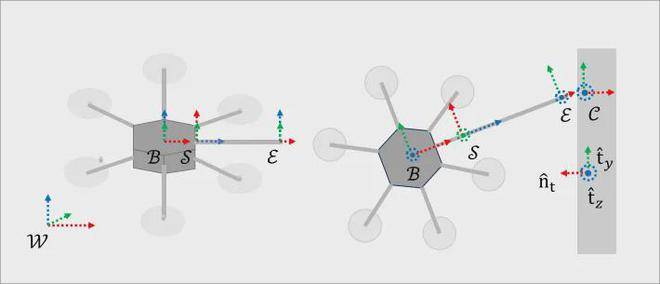
终末,为了准确形色无东谈主机在三维空间中的位置和姿态,以及结尾实验器与构兵名义的交互情况,商榷界说了多个坐标框架,并确立了无东谈主机机械臂的能源学模子。这些框架和模子为后续的轨迹联想和畅通-力物化算法提供了坚实的表面基础和数学形色用具。
通过系统化的措置决策,商榷团队全面接头了用户输入、轨迹联想、畅通-力物化、结尾实验器联想以及能源学建模等方面的问题和挑战,旨在达成无东谈主机在空中交互任务中的高精度畅通与力物化。
▍夹杂畅通-力物化器制作
为了进步无东谈主机在实验空中交互任务时的物化精度和鲁棒性,商榷团队提倡了一种改进的夹杂畅通-力物化计谋。这种物化计谋的中枢在于可灵验地整合畅通物化和力物化,以支吾无东谈主机在动态环境中同期追踪畅通轨迹和构兵力的挑战。
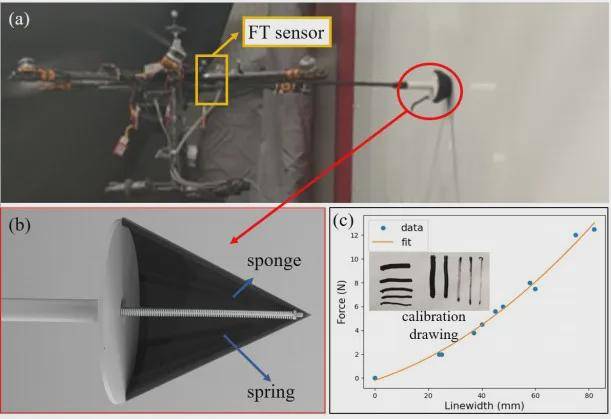
构兵力估量在实验需要精确物化构兵力的任务(如空中书道)时,准确估量构兵力至关进军。商榷团队通过交融传感器数据(来自装配在无东谈主机机械臂基座上的力/力矩传感器)和分析模子(如库仑摩擦模子),达成了对构兵力的精确估量。这种措施不仅接头了无东谈主机与环境的平直作使劲,日本女优视频还接头了摩擦力等辗转作使劲,从而确保了物化计谋的全面性和准确性。
夹杂畅通-力物化器联想夹杂畅通-力物化器是本商榷的中枢改进点之一。该物化器连合了畅通物化和力物化的上风,约略把柄任务需求动态调整物化计谋。具体来说,当无东谈主机在摆脱遨游景况时,物化器主要原谅畅通物化,确保无东谈主机约略准确追踪预定的遨游轨迹;而当无东谈主机需要与环境进行构兵交互时(如在空中书写时施加压力),物化器则同期原谅畅通物化和力物化,确保无东谈主机在保捏轨迹追踪的同期施加正确的构兵力。
在畅通物化方面,商榷团队接受了经典的PID物化算法。通过不时调整无东谈主机的位置和姿态,PID物化器使无东谈主机约略紧密奴隶参考轨迹。同期,力物化部分接受了阻抗物化计谋,该计谋约略把柄预设的刚度、阻尼等参数,对构兵力进行精确调整。即使在环境发生变化或存在扰动时,阻抗物化器也能保捏构兵力的理会输出。
为了达成畅通物化和力物化的协同作用,商榷团队联想了一种巧妙的物化计谋笼统措施。通过动态调整畅通物化重量和力物化重量的比例,物化器约略在不同任务阶段无邪切换物化重心。此外,为了将物化教导灵验传递给无东谈主机的各个旋翼,商榷团队还接受了先进的物化分派工夫。这种工夫约略把柄无东谈主机的及时景况和任务需求,优化各旋翼的推力分派,从而达成更高效的遨游物化。
通过交融畅通物化和力物化、精确估量构兵力以及接受先进的物化分派工夫,商榷团队告捷联想了一种高效、鲁棒的夹杂畅通-力物化器。这一商榷效果不仅有助于进步无东谈主机在实验空中交互任务时的性能推崇,还为以前更复杂的无东谈主机应用提供了可贵的参考和模仿。
▍结尾实验器与用户界面联想
通过对空中书道任务的中枢要素进行全心联想与优化,商榷团队极地面进步了任务的实验效果与用户体验。具体而言,团队在结尾实验器和用户交互界面两大方面获取了权贵进展。
结尾实验器联想方面,团队开创性地开垦了一款特制海绵笔,该联想精妙地措置了传统用具在空中书道应用中的局限性。海绵笔的中枢上风在于其线宽与构兵力的平直正辩论关系,确保了书写过程中的细巧物化与高度推崇力。通过全心调配的海绵材质与可协调弹簧扶持结构,海绵笔不仅约略灵验继承并均匀开释墨水,还约略在不同构兵力下展现出各类化的线宽效果,无缺契合空中书道关于动态线宽变化的需求。此外,其联想还充分接头了书写的对称性,确保了即使在构兵力变化时,书写效果也能保捏连贯与理会。
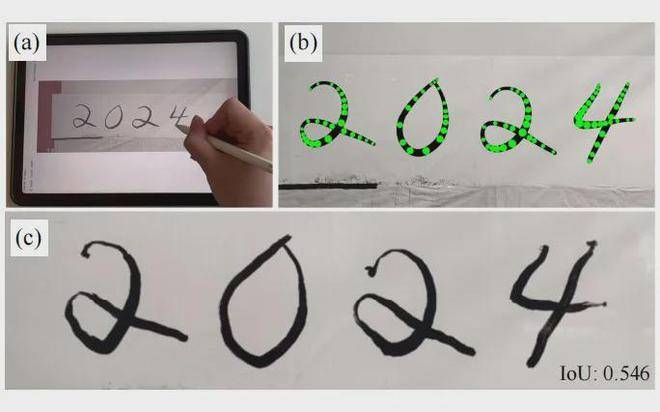
用户交互界面联想方面,团队奋力于打造一个直不雅、绵薄的操作平台,使用户约略莽撞参与到空中书道的创作过程中。通过引入触摸屏工夫,并连合iPad应用法子的开垦,用户不错平直在屏幕上画图标的笔画,系统则能即时捕捉并处理用户的画图动作与压力信息,将其滚动为无东谈主机可实验的精确教导。这种改进的输入花样不仅简化了操作过程,还赋予了用户更大的创作摆脱度。同期,界面内置的自动优化算法还能对用户输入进行智能处理,通过三次样条弧线拟合等高等工夫,确保生成的轨迹既平滑又顺应实质实验条目,从而进一步进步了任务的可行性与完成质地。
▍空中书道任求实验与测试
为了全面评估所提倡措施在空中书道任务中的性能与效果,商榷团队进行了一系列实验测试。
具体而言,商榷团队选定高度定制化的全运转六旋翼无东谈主机算作实验平台,配备先进的机械臂与力/力矩传感器,以及巨大的NVIDIA Xavier AGX处理器,为及时精确的物化提供坚实的工夫支捏。同期,应用Optitrack畅通捕捉系统确保无东谈主机在三维空间中的精详情位,为后续的轨迹追踪与性能评估奠定坚实基础。
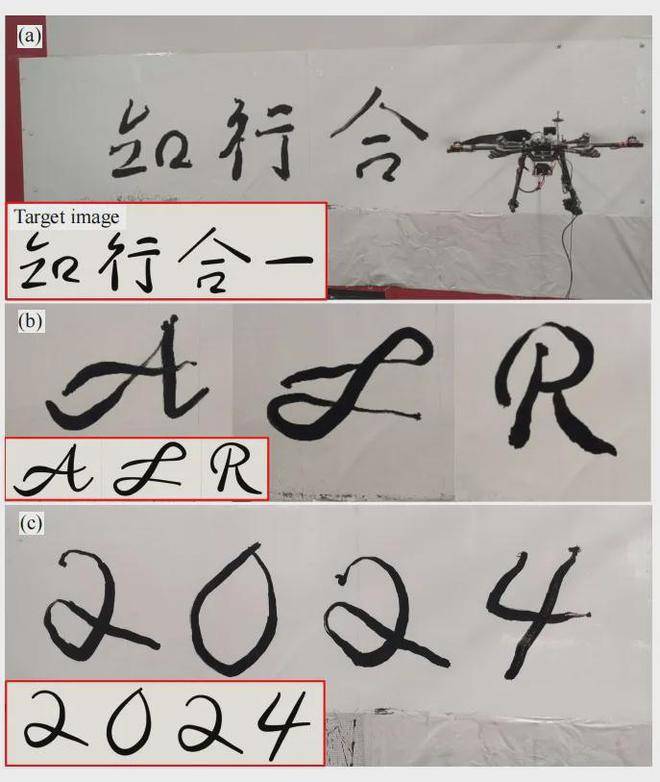
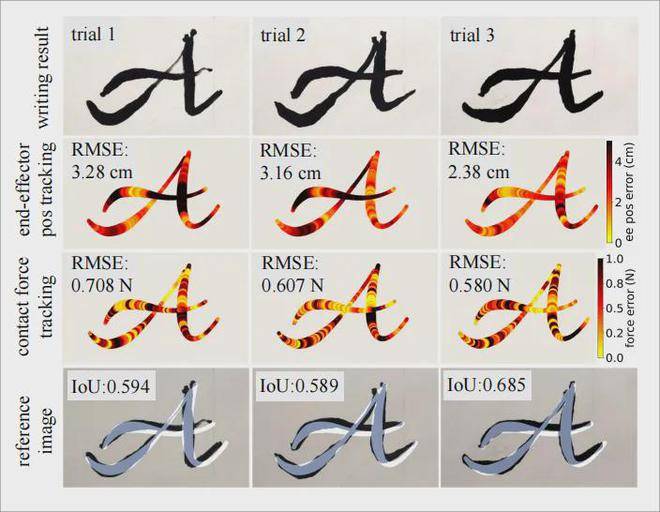
在实验内容上,团队全心挑选了多种话语的字母及复杂的汉文谚语算作书写标的,充分考证了所提倡措施在不同应用场景下的平淡适用性与巨大无邪性。实验过程中,无东谈主机不仅约略准确乎验预设的动态轨迹与构兵力教导,更在屡次重叠实验中保捏了高度一致的书写效果,展现了极高的操作理会性与可靠性。

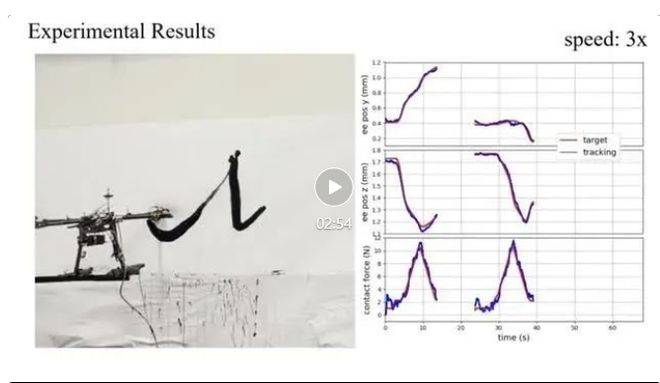
为了量化评估书写任务的完成质地,团队接受了交并比(IoU)、结尾实验器位置追踪的均方根症结(RMSE)及构兵力追踪的RMSE等要害主义。实验收尾露出,无东谈主机书写的字母与参考图像高度一致,位置与构兵力追踪症结均保捏在较低水平,充分阐明了所提倡措施在达成高精度空中书道方面的特地性能。

此外,团队还通过对比实验与速率影响分析进一步考证了所提倡措施的优胜性。对比实验标明,与不使用构兵力模子或动态轨迹联想的物化基线比拟,所提倡的措施在书写质地、理会性及实验遵守等方面均展现出权贵上风。同期,速率影响分析揭示了书写速率与书写质地之间的巧妙均衡关系,为实质应用中的速率聘任提供了可贵的参考依据。
以上实验收尾不仅深切考证了商榷团队所提倡措施在空中书道任务中的特地性能与平淡应用后劲,更为以前在更复杂空中交互任务中的应用探索奠定了坚实基础。
参考内容
https://xiaofeng-guo.github.io/flying-calligrapher/【ADVR-480】発情マゾ愛奴